Kapitel 3.9
Sicherheit von Roboteranwendungen
Erfahren Sie mehr über geeignete Sicherheitskonzepte für Ihre Roboteranwendung – vom „Käfig“ zum „Cobot“
Roboter sind flexibel einsetzbar und ermöglichen dadurch sehr wirtschaftliche Automatisierungslösungen. Aber leider sind sie auch recht gefährlich.
Insbesondere große, sehr schnelle Roboter können schwere Verletzungen verursachen, vor allem durch Quetschen und Stoß. Daher wurde die Sicherheit von Roboteranwendungen international genormt (EN) ISO 10218-1 e -2 e, per gli Stati Uniti, nella quasi identica ANSI/RIA R15.06. Inoltre, è stato pubblicato uno standard per i robot mobili con la norma ANSI/RIA R15.08. Nachfolgend finden Sie einige wichtige Sicherheitsregeln.
Robotersicherheit stützt sich auf drei Säulen:
- den Zutritt durch Personen verhindern
- den Bewegungsraum des Roboters einschränken
- den direkten Kontakt sicher gestalten
Die letztgenannte Möglichkeit ist eher neu. Oft spricht man diesbezüglich von „kollaborierenden Robotern“. Damit meint man einen Roboter, der für die direkte Zusammenarbeit mit dem Menschen in einem gemeinsamen oder in überlappenden Arbeitsbereichen ausgelegt ist. Dabei muss zunächst der Kollaborationsraum und die Art der Zusammenarbeit zwischen Mensch und Roboter geplant werden. Im Anschluss werden die entstehenden Risiken ermittelt und geeignete Schutzmaßnahmen getroffen.

Was ist ein „kollaborierender Roboter“?
Die fortschrittlichste Sicherheitsmaßnahme in der Robotik ist der sog. „kollaborierende Roboter“, manchmal auch als „Cobot“ bezeichnet.
Ein kollaborierender Roboter ist bezüglich seiner Kräfte und Geschwindigkeit begrenzt. Menschen, die mit dem sich bewegenden Roboter in Kontakt kommen, werden nicht von ihm verletzt. Schmerz kann jedoch die Folge einer Kollision sein.
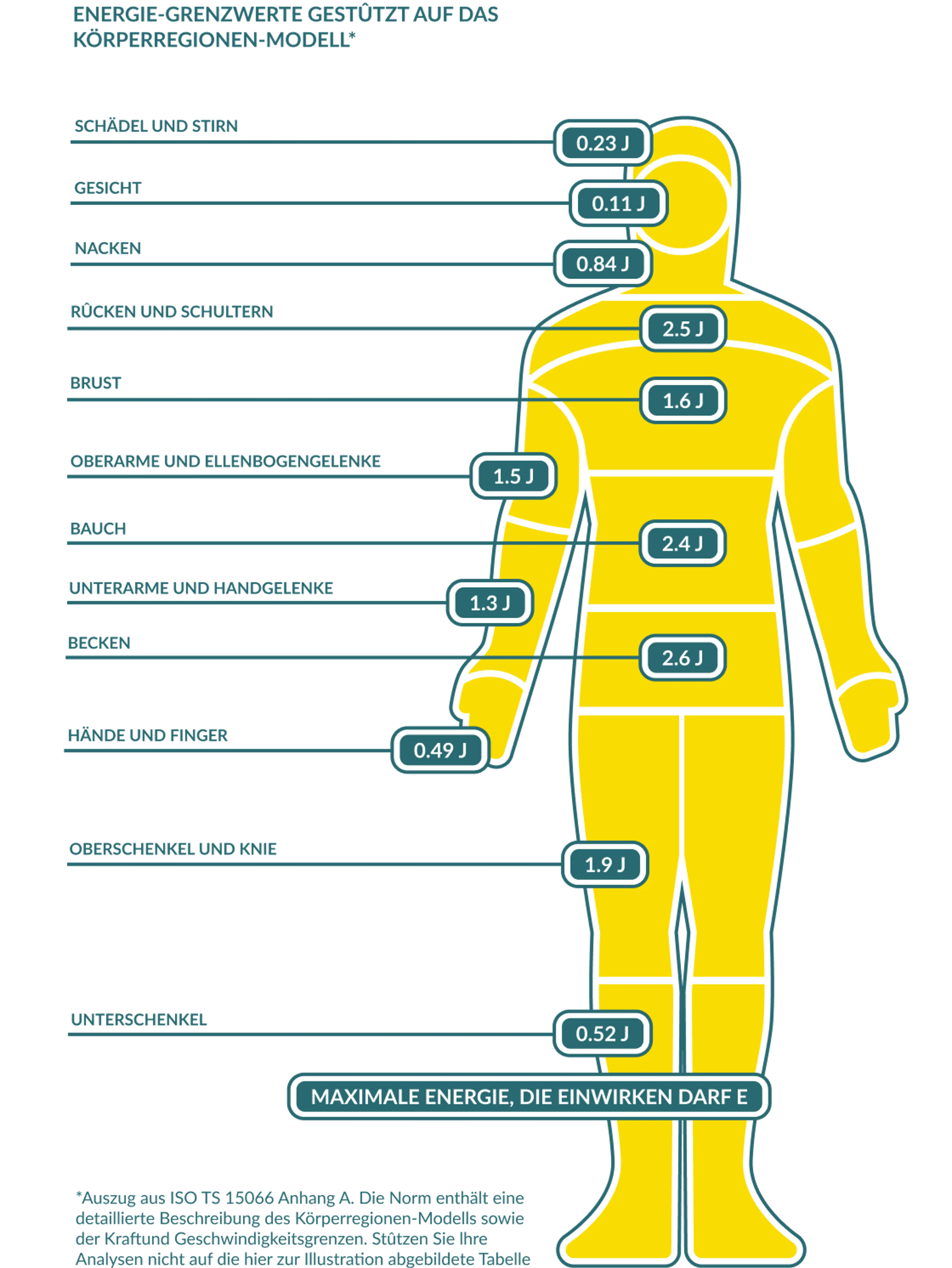
Jahrelange aufwändige Testreihen waren nötig um eine Liste von Kraft- und Geschwindigkeitsgrenzwerten zu erarbeiten, die für Menschen beim Kontakt mit mechanischen Maschinenelementen erträglich sind (siehe ISO TS 15066).
Kollaborierende Roboter, die sich innerhalb dieser Grenzwerte bewegen, können für Anwendungen, bei denen direkter Kontakt zwischen Mensch und Roboter besteht, als sicher gelten. Allerdings bedeutet das nicht, dass der Einsatz eines solchen Roboters immer oder gar automatisch sicher ist. Stattdessen muss immer die gesamte Anwendung beurteilt werden, d. h. der Roboter selbst und das Werkzeug, das der Roboter handhabt (der sog. „Endeffektor“).
Beispiel:
- Stellen Sie sich vor, Sie müssten neben einem Roboter arbeiten, der mit einer Spritze und einer giftigen Flüssigkeit hantiert. Geschwindigkeit und Kraft wären dann eher nebensächlich.
Schutzmaßnahmen:
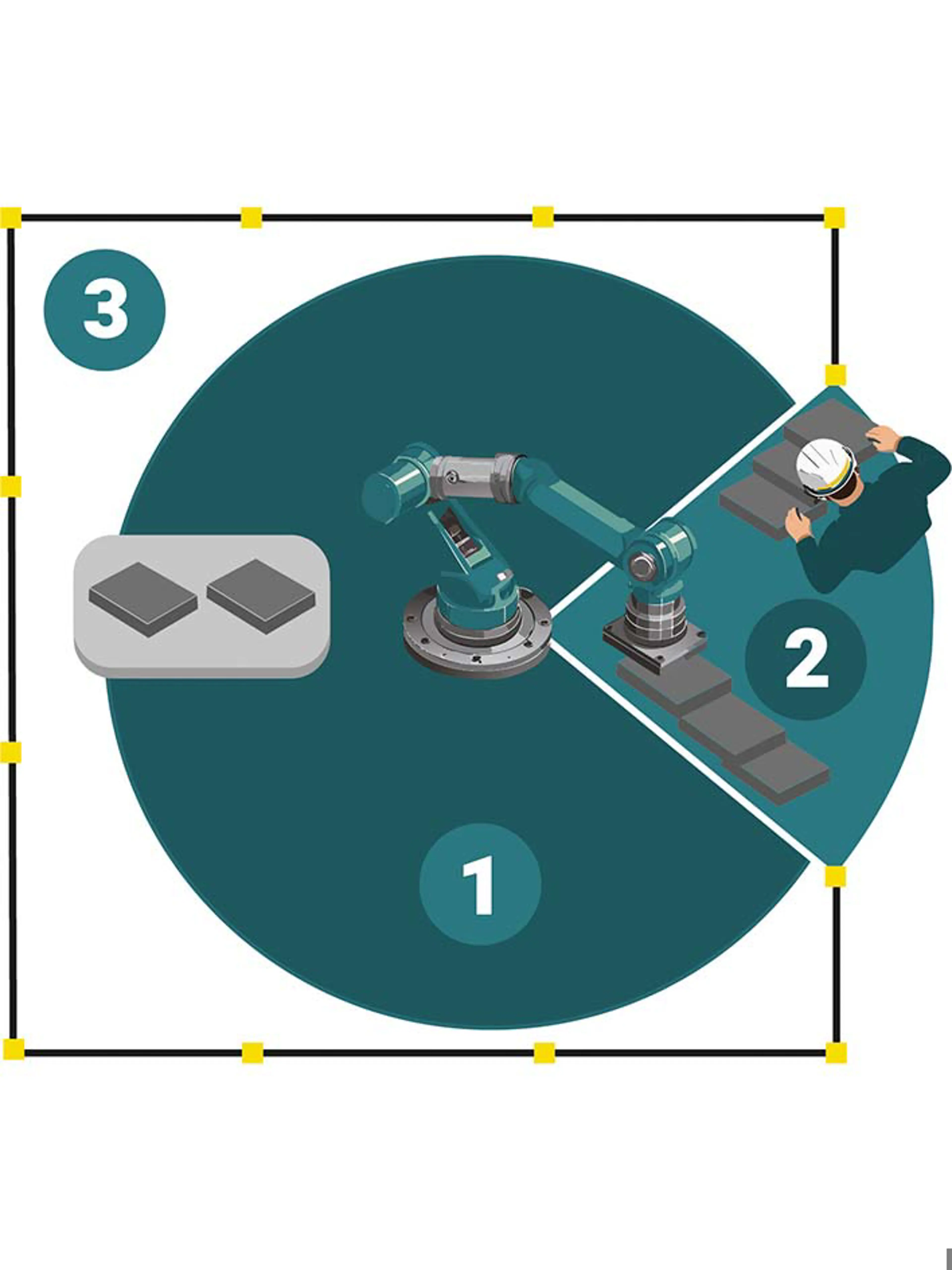
In der nebenstehenden Grafik teilen sich ein Bediener und ein Roboter den hellgrauen Kollaborationsraum.
- Ein inhärent gefährlicher Roboter darf sich im Kollaborationsraum nicht bewegen, solange eine Person anwesend ist.
- Abhängig vom Abstand und der Bewegungsgeschwindigkeit der Person muss der Roboter abbremsen und anhalten, während sich die Person nähert.
Schutzzäune:
- Schutzzäune sind auch für die Mensch- Roboter-Kollaboration nach wie vor und zukünftig erforderlich!
- Der Schutzzaun übernimmt in diesen Anwendungen sogar eine neue Rolle: Er dient zur Abgrenzung des Kollaborationsraumes zu konventionellen Arbeitsplätzen und Verkehrswegen.
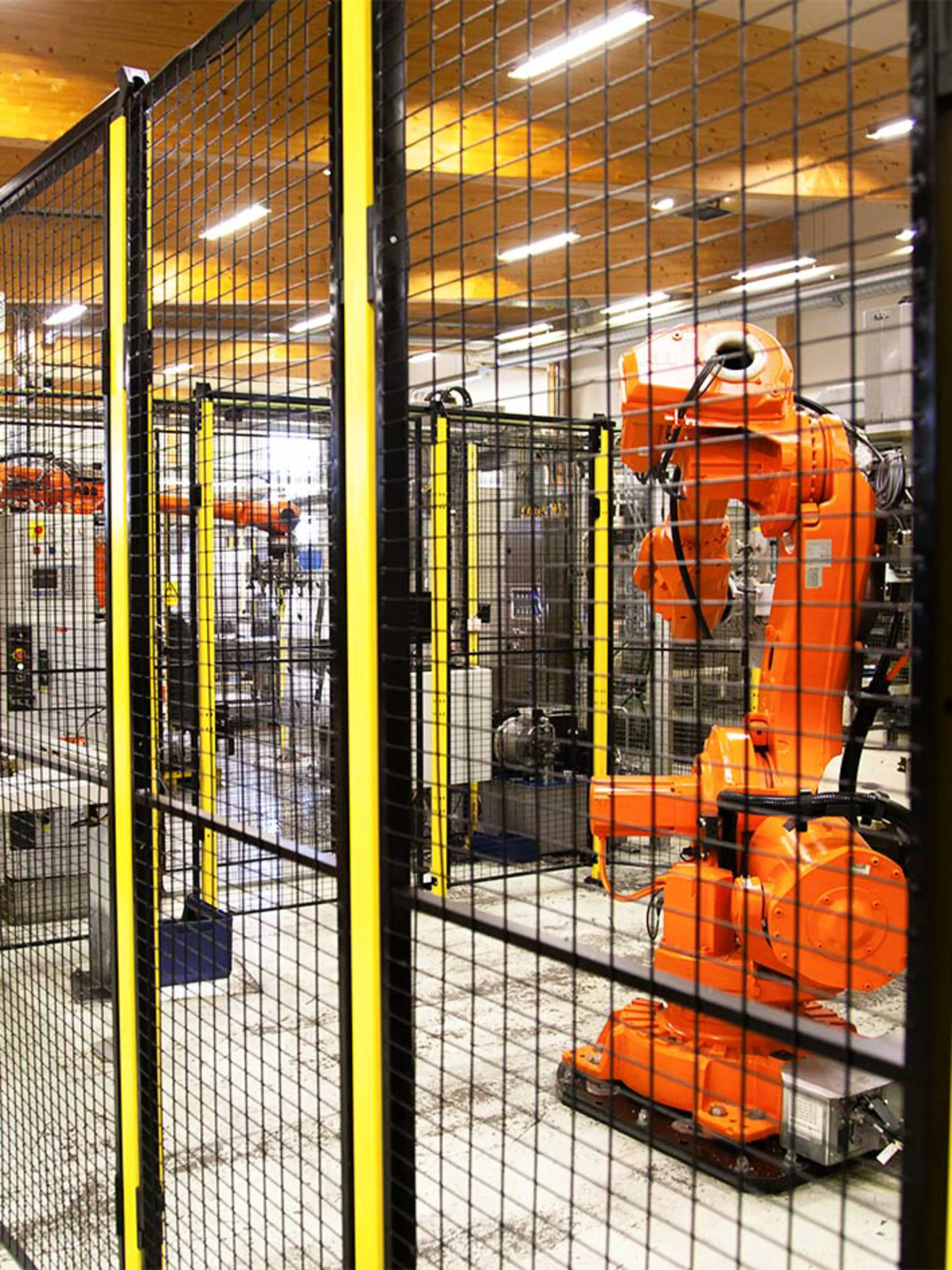
Industrieroboter-Sicherheit
Die Sicherheit von Robotern hängt weitgehend von geschlossenen „Zellen“ mit Zäunen und Zugangstüren ab. In vielen Anwendungen werden jedoch zusätzlich Überwachungssysteme benötigt oder können sogar den „Käfig“ des Roboters ersetzen.
Fortschrittliche Erkennungssysteme:
- In vielen Roboterzellen wird eine Kombination aus Sicherheitszäunen mit Türen, Lichtschranken und Reichweitenscannern eingesetzt.
Beachten Sie, dass sich Personen im Gefahrenbereich hinter den Detektoren aufhalten könnten. Wenn dies möglich ist, können zusätzliche Sicherheitsmaßnahmen erforderlich sein.
- Die fortschrittlichste Form des Erkennungssystems ist eine 3D-Kamera. Sie muss in ausreichender Höhe über dem Arbeitsbereich installiert werden, um sicherzustellen, dass sie alle Bereiche „sieht“, in denen sich Personen bewegen können.

Schutzzäune können daher eingesetzt werden, um den „geschützten Bereich“ zu definieren, aber sie sollten normalerweise nicht verwendet werden, um den „begrenzten Raum“ zu bilden.
Ein Roboter, der mit hoher Geschwindigkeit in einen Zaun einschlägt, wird diesen zumindest teilweise verformen, selbst wenn es sich um einen sehr stabilen Zaun handelt. Das könnte eine Gefahr darstellen. Außerdem können Personen ihre Finger durch das Gitter stecken. Daher muss zwischen der Außenseite des Schutzgitters und dem begrenzten Raum ein Mindestabstand von 120 bis 200 mm verbleiben (compare the section on "Determining the proper height and distance of guard fencing".
Statt also nach einem vermeintlich „robotersicheren“ Schutzzaun zu suchen, sollten Sie lieber geeignet
- Eine sicherheitsbezogene Softwaresteuerung der Roboterbewegungen (sollte mindestens
PL = d nach EN ISO 13849-1 erreichen
- Begrenzungsanschläge (Anschlagblöcke und -bolzen)
- äußere Begrenzungseinrichtungen (mechanische Endschalter oder Näherungsschalter)
Schutzzäune sind dazu da, Personen draußen zu halten und nicht den Roboter zurückzuhalten.

“Robotersicherer“ Zaun – Schutzkonzept oder Missverständnis?
Viele Anwender fragen heute nach sog. „robotersicheren“ Schutzzäunen und weisen auf die Testresultate bestimmter Hersteller hin, die deren Produkte angeblich einer Stoßbelastung von 2000 Joule oder mehr widerstehen.
Aber mal ehrlich, schon die Frage offenbart ein gewisses Missverständnis bezüglich der Sicherheitsanforderungen an Roboteranwendungen. Die Sicherheitsnormen für Roboter verlangen nämlich, die Bewegungen eines Roboters durch etwas anderes als einen Zaun zu begrenzen.
Der Bewegungsbereich eines Roboters wird durch seine Größe bestimmt. Oft ist dieser sog. „maximale Raum“ viel größer als erforderlich. Da jeder Anlagenbauer so wenig Aufstellfläche wie möglich zu nutzen versucht, wird der Roboter so programmiert, dass er sich in einem viel kleineren „eingeschränkten Raum“ bewegt. Außerhalb des „eingeschränkten Raums“ wird mit Hilfe von Schutzzäunen, Lichtvorhängen und Bereichsscannern ein „geschützter Bereich“ definiert, in den Personen nicht eintreten dürfen.
Doch muss praktisch immer ein Sicherheitsabstand zwischen dem eingeschränkten Raum und dem geschützten Bereich freibleiben. Warum? Weil der Roboter Zeit braucht abzubremsen und zum Stillstand zu kommen, wenn eine Person beim Eintritt in den geschützten Bereich detektiert wird (zum Beispiel von einer Lichtschranke, einem Scanner, einer Kamera oder einem Sicherheitstürschalter).
Personen aus der Gefahrenzone fernhalten